Beating the Scribd AI Challenge - Implementing Traits through Heuristics
Teaching a digital robot how to eat fruit with artificial intelligence
A couple days ago, this post reached the front page of Hacker News. The Scribd engineering team introduced a game where you build a bot that faces off other programmers’ bots in a race to collect the most fruit. I highly recommend reading the rules if you haven’t already; it will make the rest of the post much more clear. Having never built an AI bot before, I thought I’d give it a shot. Here’s what I did:
Strategy
Before I wrote any code, and I sat down with a pad and pencil and wrote down a couple traits that a good bot would have.
- It should collect ‘rarer’ fruits before the more common ones. For example, since there is only one Apple in each game, it should value Apples more than the other fruits.
- It should gather ‘clincher’ fruits before other fruits. Say, when you and your opponent have each collected two Cherries and there is only one remaining on the board. Then the last remaining Cherry must be valued more highly than the other fruits.
- The farther away a fruit is from the bot, the less the bot should care about the fruit. If a bot is 20 steps away from an Apple and only 3 steps away from a Banana, it should gather the Banana first.
- It should ignore fruits that no longer matter. For example, if your opponent has collected three out of the five total Cherries, you shouldn’t bother collecting Cherries since you have already lost the category.
There were a first other traits I had in mind, but these seemed to be a good starting point for a MVB (Minimum Viable Bot). My next step was to take these traits and through code, instill them in my bot.
Approach
Rather than having a bunch of if-then rules, I used a very simple statistical method to mimic intelligence. For each fruit on a given board, I would generate a heat map around it, like below:
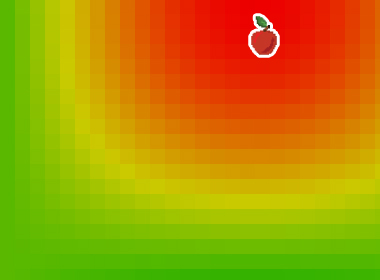
Out of the four possible directions the bot could travel, it would compare them to see which field had the most ‘heat’ and it would go in that direction.
Coding
Here’s the code for the bot. It’s really simple - just 100 lines with comments.
You can see that the function add_heat() is used to implement the traits I specified in my strategy above. I also included 4 parameters that specify the degree to which each of those heuristics is followed. I started out with each of the parameters at 1, and after a few manual tests against the default ‘SimpleBot’ opponent, I decided to use the above values and upload my bot.
// number of fruits
var num;
// array holding number of types of fruits
var totalfruits = [],
myfruits = [],
hisfruits = [],
remainfruits = [], // fruits of a given type remaining
deadfruits = []; // meaning we dont care about this fruit
// we have either won or lost in this category
// board specifying weights
var heatmap;
function new_game() {
num = get_number_of_item_types();
for (var i = 1; i <= num; i++)
totalfruits[i] = get_total_item_count(i);
}
function make_move() {
// initialize heatmap
heatmap = [];
for (var i = 0; i < WIDTH; i++) {
for (var j = 0; j < HEIGHT; j++) {
if (typeof heatmap[i] == 'undefined') { heatmap[i] = []; }
heatmap[i][j] = 0;
}
}
var board = get_board(),
x = get_my_x(),
y = get_my_y();
// get current fruit counts
for (var i = 1; i <= num; i++) {
myfruits[i] = get_my_item_count(i);
hisfruits[i] = get_opponent_item_count(i);
remainfruits[i] = totalfruits[i] - myfruits[i] - hisfruits[i];
deadfruits[i] = myfruits[i] > totalfruits[i] / 2 || hisfruits[i] > totalfruits[i] / 2 ? 1 : 0;
}
for (var i = 0; i < WIDTH; i++) {
for (var j = 0; j < HEIGHT; j++) {
// if there is a fruit on this field and it is not 'dead', add
// to heat map
if (board[i][j] > 0 && !deadfruits[board[i][j]]) {
add_heat([i, j]);
}
}
}
// Compare N, S, E, W and T (take). Choose highest value
var n, s, e, w, t, max;
n = get_my_y() > 0 ? heatmap[x][y-1] : -1;
s = get_my_y() < (HEIGHT-1) ? heatmap[x][y+1] : -1;
e = get_my_x() < (WIDTH-1) ? heatmap[x+1][y] : -1;
w = get_my_x() > 0 ? heatmap[x-1][y] : -1;
t = heatmap[x][y];
max = Math.max(n, s, e, w, t);
if (t == max && has_item(board[x][y])) return TAKE;
else if (t == max) max = Math.max(n, s, e, w);
if (n == max) return NORTH;
if (s == max) return SOUTH;
if (e == max) return EAST;
if (w == max) return WEST;
return PASS;
}
// Parameters
var c1 = 1.6, // determines how much the 'importance' of a fruit relates
// with the total # of that type of fruit. As c1 increases, the
// less common fruits become relatively more valuable. c1 > 0
c2 = 1.5, // determines the importance of 'clincher' fruits. If a fruit
// category is a close race, then that fruit becomes more important.
// As c2 increases, this effect increases. c2 > 0
c3 = 1.2, // determines how much the importance of a fruit dissapates as a
// function of distance from our robot.
// As c3 increases, the importance dissapates more rapidly
c4 = 3; // determines how important picking up a fruit at this spot is
function add_heat(field) {
var board = get_board();
var fruit = board[field[0]][field[1]];
// Use parameters to generate multipliers for fruits importance weights
var mult = Math.pow(totalfruits[fruit], -c1);
var clinch = Math.pow(totalfruits[fruit] / remainfruits[fruit], c2);
var para = mult * clinch;
for (var i = 0; i < WIDTH; i++) {
for (var j = 0; j < HEIGHT; j++) {
var dist = distance(field, [i, j]);
if (dist == 0)
heatmap[i][j] += c4 * para;
else
heatmap[i][j] += Math.pow(distance(field, [i, j]), -c3) * para;
}
}
}
// Distance between two points (in turns)
function distance(a, b) {
return Math.abs(a[0] - b[0]) + Math.abs(a[1] - b[1]);
}Results
The bot (named ‘mo’ a la Wall-E) is doing pretty well. It wins about 60% of it’s matches, ties about 20%, and loses 20%. It’s been floating around the leaderboard at around 15-20th. The thing is, the program is still very rudimentary. When I get more time, I’ll implement a genetic algorithm to ‘evolve’ the best possible combination of my four parameters. I’ll detail that process for you in my next post if there is interest.
{kind=link}